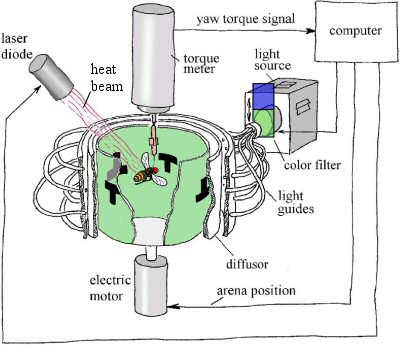
In the Drosophila flight simulator, a single fly, glued to a small hook of copper wire and attached to a torque meter, is flying stationarily in the center of a cylindrical panorama (arena). In the flight simulator mode (closed loop), the rotational speed of the arena is made proportional to the fly's recorded yaw torque around its vertical body axis. This enables the fly to stabilize the rotational movements of the panorama (i.e. to fly straight) and to adjust certain flight directions with respect to particular visual landmarks (patterns). Yaw torque and flight direction of the fly are recorded continuously and stored in the computer memory (sampling frequency 20 Hz). The illumination of the arena can be colorized by inserting color filters (e.g. green and blue) between the light source and the light guides. The patterns on the inside of the arena wall can quickly be changed during the experiment. A laser diode provides an infra-red heat beam, which is unpleasant for flies.
Combined with heat reinforcement, the setup can be used for operant and classical conditioning, respectively. All possible contingencies between the fly's behavior, the visual cues and the reinforcer can be established in the flight simulator. One can think of at least for basic types of relations into which the three components (behavior, stimulus, reinforcer) can be brought: I. Classical conditioning, II. Pure operant conditioning, III. Parallel operant conditioning, IV. Facilitating operant conditioning. The theoretical background for this classification as well as a detailed explanation of the four types can be found at my general introduction.
|